







C-V2X 技術簡介以及 FCC 最新適用規範
蜂巢式車聯網(C-V2X)為一種無線通訊技術,旨在實現車輛間(V2V)、車輛與交通基礎設施(V2I)、行人(V2P),以及車輛與行動網路或雲端後端(V2N)之間的相互通訊。作為智慧交通系統(ITS)之關鍵組成部分,C-V2X 透過車輛、交通基礎設施、行人,以及行動網路或雲端後端間的低延遲、高可靠性通訊,促進聯網與自動駕駛車輛(CAV)之進階安全防護與行動應用。C-V2X 可強化環境感知能力、提升安全性,並實現自動駕駛車輛所需的協同駕駛操作。
C-V2X 強化自動駕駛能力
1. 透過非視距(NLOS)感測,提升環境感知能力
- 相較於直接仰賴視距訊號的光達與雷達,C-V2X 使車輛得以偵測隱藏之危險,例如:
- 遭其他車輛遮蔽之突發緊急煞車。
- 自身泊車輛後方步道人進入行人。
- 遠處駛來之緊急救援車輛,使車輛得以提前讓路。
2. 低延遲通訊試行機,實現即時決策
- C-V2X 以毫秒級延遲運作,使自動駕駛車輛得以:
- 對車輛煞車、路面微小危險物或交通號誌變化做出即時反應。
- 執行協同操作,如與鄰近自動駕駛車輛同步變換車道。
- 縮短緊急情況之反應時間,提升道路安全。
3. 協同駕駛與車隊行駛
- 透過 C-V2X 形成車隊行駛,具有以下優勢:
- 因減少空氣阻力而提升燃油效率。
- 提升交通流量,緩解高速公路壅塞。
- 因車輛間即時溝通車速與煞車資訊,提升行車安全。
4. 高精準度地圖導航
- 自動駕駛車輛仰賴高精準度地圖,而地圖須即時更新。
- C-V2X 透過車輛與網路(V2N)通訊,實現地圖更新,提供以下資訊:
- 道路封閉、繞行路線與車道限制。
- 因天候或施工區域而實施之臨時速限。
- 交通壅塞情況與替代路線。
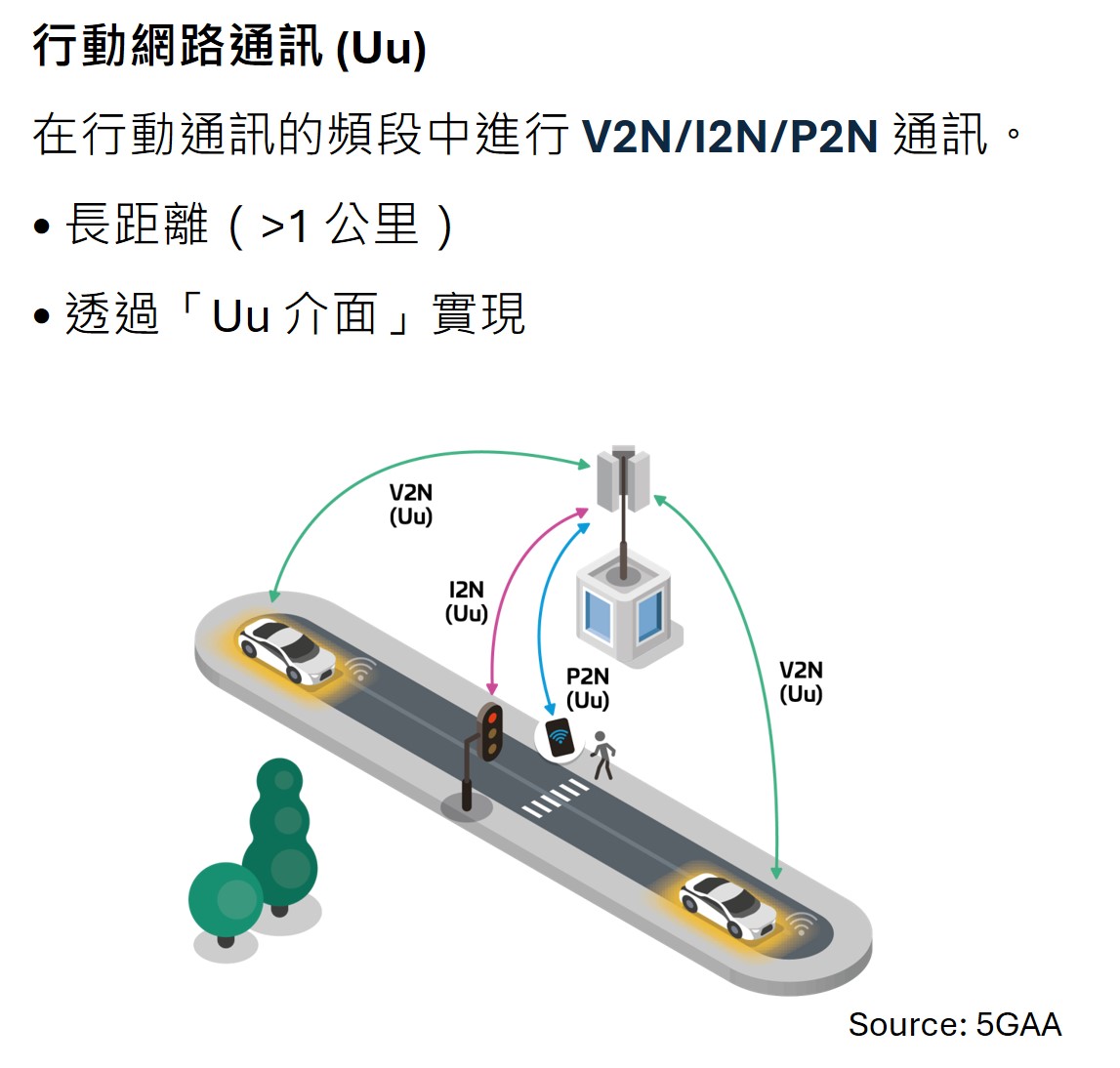
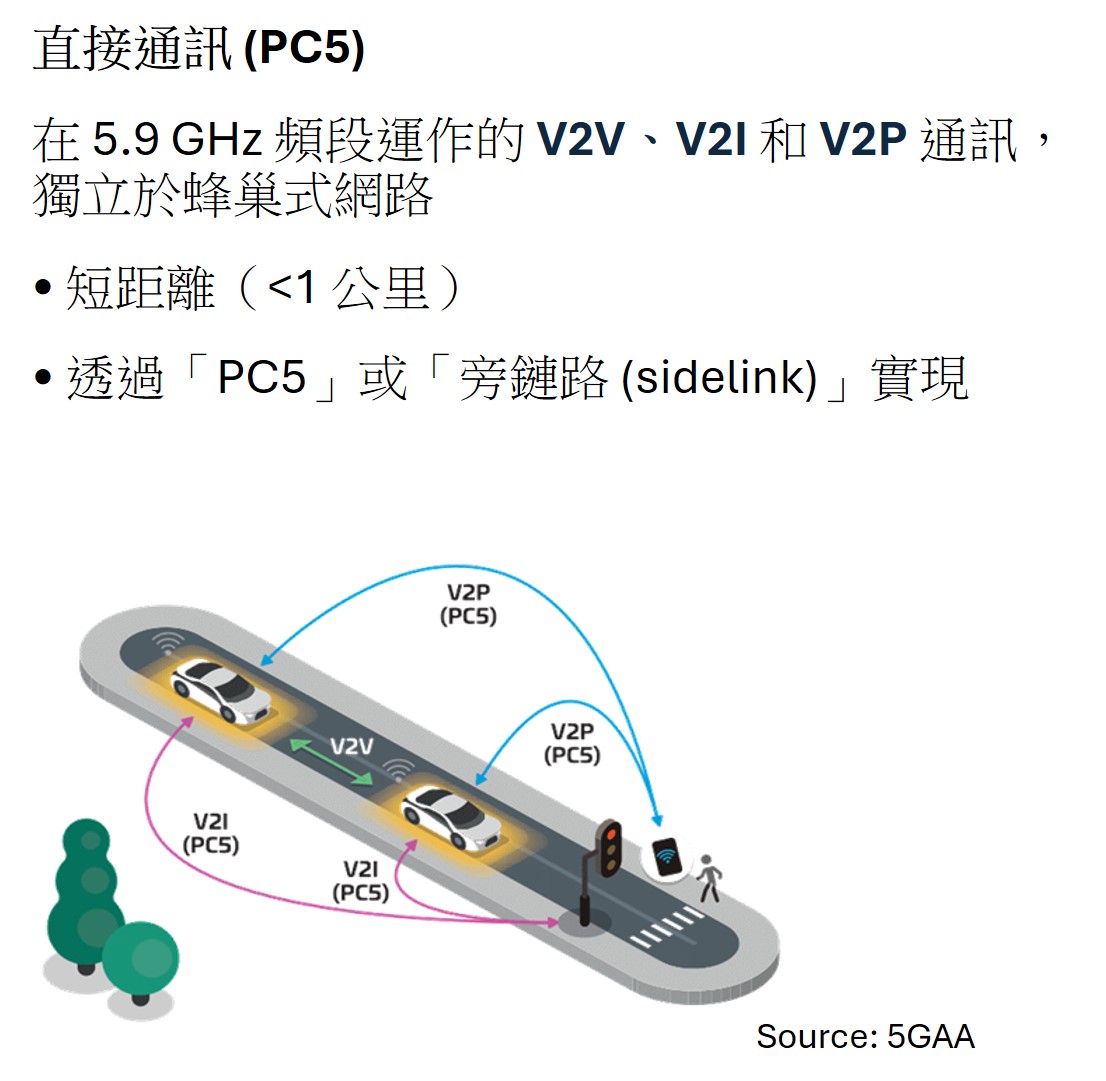
C-V2X 中兩種互補的通訊模式
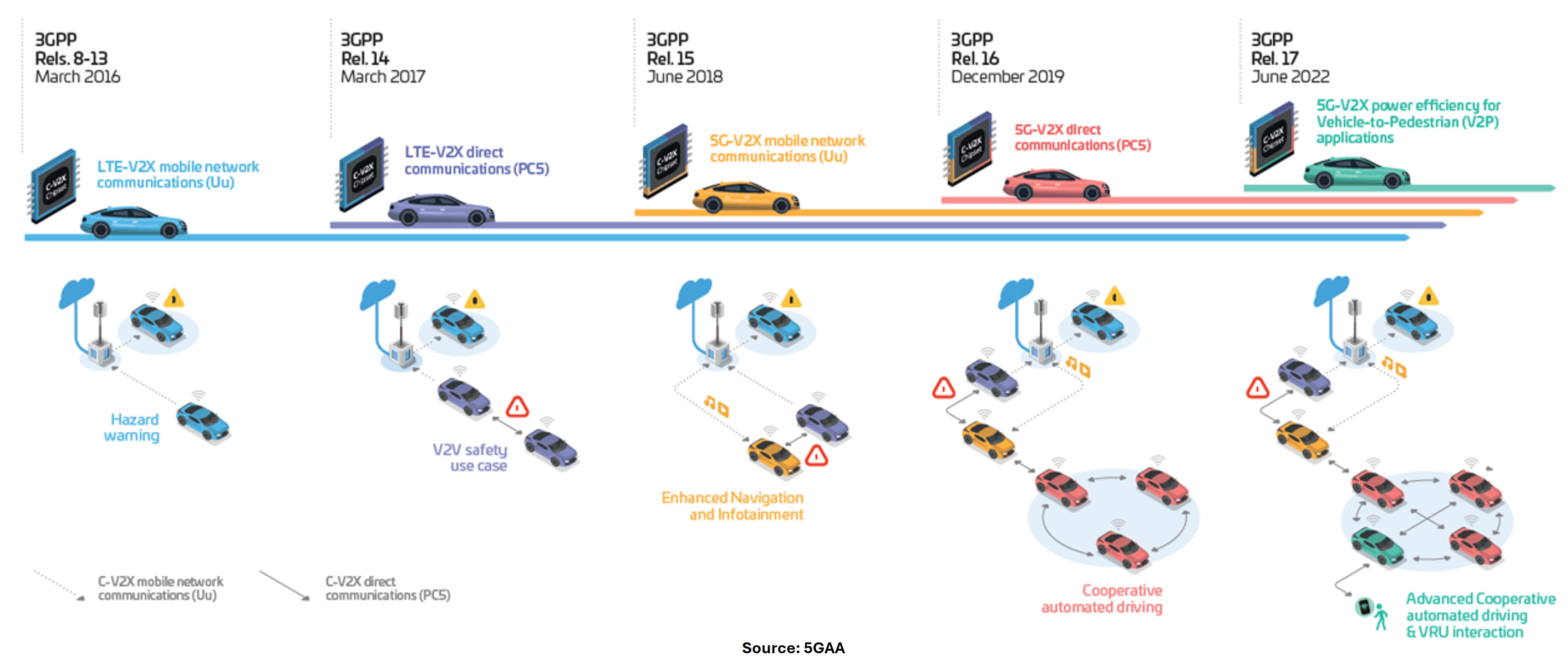
C-V2X 技術演進
| C-V2X 與其他 ADAS 技術比較 | ||
| 技術 | 優點 | 尚未完備之處 |
| C-V2X | 非視線訊號感測和低延遲通訊可實現更好的狀態意識和即時決策 | 仍處於早期部署階段,需要被廣泛導入 |
| LiDAR | 高精度 3D 物體偵測 | 在霧裡、雨裡、雪裡偵測困難 |
| Radar | 在惡劣天氣下也能正常運作 | 區分物件能力有限 |
| Cameras | 辨識路標、車道和物體 | 需要強大的人工智慧,在弱光和霧中功能有限 |
| HD Maps + GPS | 提供全球定位和道路佈局 | 不是即時的,可能會有過期資訊 |
V2X 與 ADAS 相輔相成,為自動駕駛汽車提供全方位的安全解決方案。
演進至 5G NR-V2X(3GPP 版本 16+)
5G NR-V2X 將實現:
- 針對複雜駕駛環境,提供更高的資料傳輸速率與更低的延遲。
- 為半自動及全自動(4/5 級)駕駛提供關鍵支援。
- 強化協同感知能力,使車輛間能即時共享感測器數據。
| 5G NR-V2X 與先前的 V2X 技術對比 | |||
| Feature | DSRC | LTE-V2X (Rel. 14) | 5G NR-V2X (Rel. 16+) |
| Latency | ~20-30ms | ~10-20ms | <10ms |
| ReliabilityR | Moderate | High | Ultra-High (99.999%) |
| Data Rate | Low | Moderate | High (for real-time sensor sharing) |
| Range | ~300m | ~500m | >1km |
| Cooperative Perception | Limited | Partial | Full (sensor fusion between vehicles & infrastructure) |
FCC 制定 C-V2X 法規
FCC 於 2024 年 11 月 20 日正式頒布法令,將 5.9 GHz(5.850-5.925 GHz)頻段由 DSRC 全面轉換至 C-V2X 技術,該法令以於 2025 年 2 月 11 日生效。FCC 採納 C-V2X 規則的主要重點如下:
- 較高頻段的 30 MHz(5.895-5.925 GHz)已明確重新分配予 C-V2X 技術使用。較低頻段的 45 MHz(5.850–5.895 GHz)則分配予 Wi-Fi 使用(Wi-Fi 6E 與 7)。
- 自 2026 年 12 月 14 日起,將全面停止基於 DSRC 技術的運作。現行 DSRC 許可證持有者於過渡期間內仍可繼續使用 DSRC,惟自 2025 年 2 月 11 日起,將不再核發新的 DSRC 許可證。
- FCC 分別於第 90M 部分針對路側設備(RSU)及第 95L 部分針對車載設備(OBU)制定了相關技術規範。
FCC 對 C-V2X 的關鍵方面技術之要求與 DSRC有所不同,包括頻譜分配、通訊技術、功率限制和頻道配置。以下乃詳細比較:
| Feature | C-V2X | DSRC |
| Frequency Band | 5.895–5.925 GHz (30 MHz) | 5.850–5.925 GHz (75 MHz) |
| Max OBU EIRP | Details see below | 33 dBm (2 W) |
| Max RSU EIRP | 33 dBm (2 W) | 44 dBm (25 W) |
| Channelization | 10, 20, or 30 MHz channels | 10 MHz channels |
為使車載設備(OBU)得以高功率運作, FCC允許業者自主導入地理圍欄功能。此功能使 OBU 能夠偵測聯邦無線電定位站點周圍的適當保護區域,並確保其於該保護區域內以較低的功率運作。
針對所有未配備地理圍欄功能的OBU,以及在FCC 第 47 CFR § 90.387(b) 所界定的協調區域內運作的配備地理圍欄功能之 OBU,適用下列功率限制:
- 10 MHz 頻道(5895-5905 MHz)與 30 MHz 頻道:最大等效全向輻射功率(EIRP)為 23 dBm。
- 10 MHz 頻道(5905-5915 MHz 與 5915-5925 MHz)與 20 MHz 頻道(5905-5925 MHz):最大 EIRP 為 33 dBm,惟在水平方向 ± 5 度範圍內,降低至 27 dBm。
- 20 MHz 頻道(5895-5915 MHz):最大 EIRP 為 23 dBm。
對於配備地理圍欄功能的 OBU,若於FCC第 47 CFR § 90.387(b) 所界定的協調區域外的位置運作,則所有頻道頻寬的最大 EIRP 均為 33 dBm。
為使配備地理圍欄功能的OBU獲得FCC之批准,申請者須提交一份說明文件,詳述所採用之地理圍欄機制。配備地理圍欄功能的 OBU 歸類於蜂巢式車聯網地理圍欄(CVG)設備類別。
美國聯邦通信委員會地理圍欄要求摘要如下:
- 地理圍欄機制可採用整合式或獨立式全球導航衛星系統(GNSS)訊號源全時連線,且僅能接收美國許可或核准之衛星訊號。
- 須明確標示預期之儀器精準度,以標準差或圓誤差機率(CEP)呈現。
- OBU 須標示最大預設等效全向輻射功率(EIRP)。當無法取得精確之位置定位時,最大預設EIRP應與未配備地理圍欄功能之 OBU 相同。
- OBU 於進入協調區域時,須降低功率。此功能可透過於 OBU 上建立本地測試協調區域及半徑進行驗證,以展示 OBU 於進入測試位置時如何降低功率。測試報告須包含高功率與低功率間之時間差對應到進入時間與功率調整,並須列出測試協調區域、測試所用半徑,以及設備進入協調區域時之行駛速度。
- 若後續協調區域及參數有所修改或新增,應提供OBU更新資訊之機制。依據FCC 第47 CFR § 90.387(b) 之規定,所有具備地理圍欄功能之 OBU 應能透過網路連結至製造商之推送服務,以便於必要時更新協調區域及參數。
隨著 FCC 致力於推動 C-V2X 技術,為自動駕駛的發展奠定基礎,我們預期美國市場將迎來 C-V2X 設備的顯著成長。憑藉我們在專用 DSRC 系統驗證方面累積的豐富經驗,SGS 台灣已做好充分準備,竭誠為客戶提供最優質的 FCC C-V2X 測試與驗證服務。如有相關需求,請隨時聯繫您的 SGS 業務代表。
📧 twwireless.MKT@sgs.com ☎ (02) 2299-3279 # 1530 / 1522